오퍼레이팅 시스템 [8] - Scheduling이란?(2)
‘멀티프로세서와 Real-Time, Linux의 스케줄링의 방법들’
Multiprocessor Scheduling
- 멀티 프로세서의 분류
- Loosely coupled or distributed multiprocessor, or cluster
- 각 프로세서들은 자신만의 메인메모리와 I/O 채널을 보유하고있다.
- Functionally specialized processors
- 각 프로세서들이 다른 목적을 갖고있으며 해당 프로세서들을 통제하는 Master processor가 존재한다.
ex) I/O processor, Floating poing processor
- Tightly coupled multiprocessor
- 프로세서들이 메모리영역을 공유하며, 운영체제의 통합 통제를 받는다. 이번에는 해당 멀티프로세서 시스템에서의 스케줄링을 다룬다.
- 멀티 프로세서 Scheduling
- Asymmetric Multiprocessing (master/slave)
- 하나의 Master 프로세서가 스케줄링을 담당하고, 나머지 프로세서는 유저 프로그램을 실행한다.
- 하나의 Master 프로세서만 시스템 데이터에 접근하므로 구현이 간단하지만, 그만큼 확장성이 떨이진다.
- Symmetric Multiprocessing (SMP, peer)
- 어떤 프로세서든 커널모드로 진입가능하다.
- 각 프로세서들은 동등한 관계를 갖으며 스스로 Self-Scheduling을 통해 프로세스를 실행한다.
- Asymmetric Multiprocessing (master/slave)
멀티프로세서에서의 Scheduling
- Uniprocessor Scheduling에서는 어떤 작업을 다음에 실행할지만 결정했던 것과는 다르게 Multiprocessor Scheduling에서는 이뿐만이 아니라 어떤 프로세서에서 작업을 실행할지도 고려해야한다.
- Ready Queue를 어떻게 관리할지 (하나의 큐 or 프로세서별 큐)
- 프로세스의 Dispatch 관리
- Uni-processor 일때 보다 dual-processor 일때 Scheduling의 효율이 떨어지는 모습을 보이므로 상대적으로 Scheduling 방법의 중요도가 떨어진다.
단일큐 Scheduling
- Global Ready Queue가 존재하여 모든 프로세서가 Idle 상태일때, 해당 Queue에서 프로세스를 Dispatch한다.
- 프로세스들은 특정 프로세서에 할당되지 않고 랜덤으로 배정된다.
- 장점 : 간단하다. Load sharing이다.
- Load Sharing : 큐를 공유함으로서 공평하게 작업이 할당되어, 특정 프로세서에만 작업이 몰리는 Load Imbalance문제가 발생하지 않는다.
- 단점
- 어떤 프로세스가 어떤 프로세서에 할당될지 정할 수 없으므로 매번 다른 프로세스를 실행하게된다. - Affinity 문제
- 동시에 Ready Queue에 접근하여 발생하는 Race Condition을 막기위해 동기화(Synchronization)작업이 필요하다 - 확장성의 문제
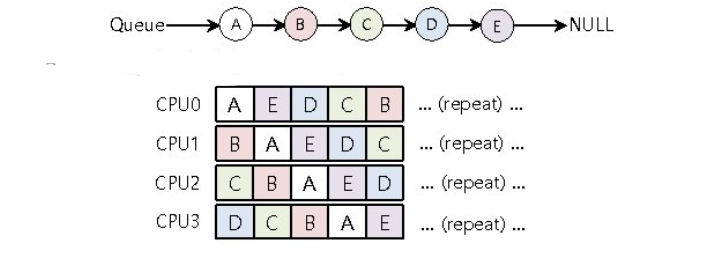 Affinity가 없는 단일큐 Scheduling
Affinity가 없는 단일큐 Scheduling
- Processor Affinity(친화력)
- 단순한 단일큐 Scheduling에서는 프로세스가 랜덤 프로세서에서 실행되므로, Cache가 오염되어 Miss rate가 증가하게된다.
- 같은 프로세스가 특정 프로세서에서만 실행되게 한다면, 캐시메모리의 데이터를 사용가능하여 (Warm cache) 효율적인 메모리접근이 가능하다.
- 대부분의 SMP(Symmetric Multi-Processing)를 지원하는 OS는 Warm Cache를 활용하기 위하여 같은 프로세서에서 반복실행하도록 설계되어있다. - 프로세스가 특정 프로세서에 Affiniy를 갖고있다.
- Soft affinity : 상황에따라 다른 프로세서에서 실행되는 예외 존재
- Hard affinity : 예외 없음
- 대부분의 경우에 affinity모두 지원하며, MP scheduling의 필수적인 요소이다.
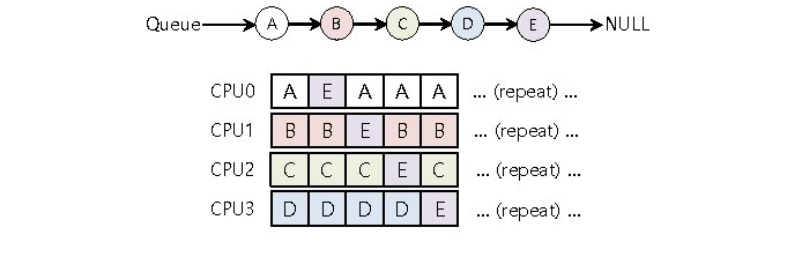 Affinity가 보장된 단일큐 Scheduling
Affinity가 보장된 단일큐 Scheduling
다중큐 Scheduling
- 각 프로세서들이 자신만의 고유 Private Queue를 소유하고있다.
- 작업이 시스템에 들어오면, 오직 하나의 Ready queue에만 위치된다.
- 각 Queue에는 프로세서에 맞는 Scheduling 방법이 적용된다.
- 고유 Queue를 사용함으로서 동기화문제 해결과 확장성, Affinity 보장
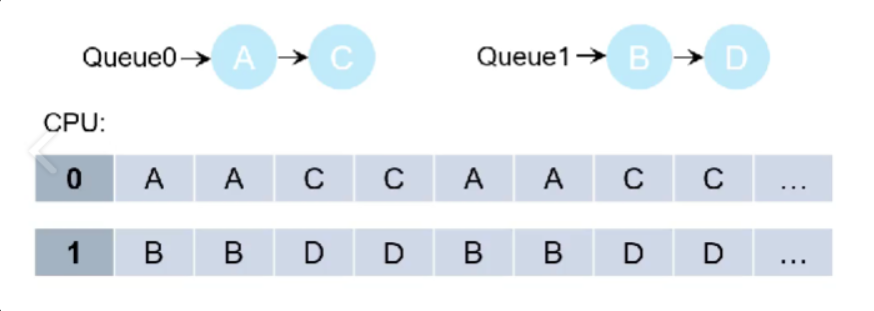 자신의 고유 Queue를 갖고있는 CPU
자신의 고유 Queue를 갖고있는 CPU
- 단점 : Load Balancing이 필요하다.
Load Balancing
- 특정 프로세서에만 Short Process가 몰리거나, 프로세스 자체가 특정 Queue에만 집중되는 등 프로세서 작업량의 불균형이 발생되는 경우
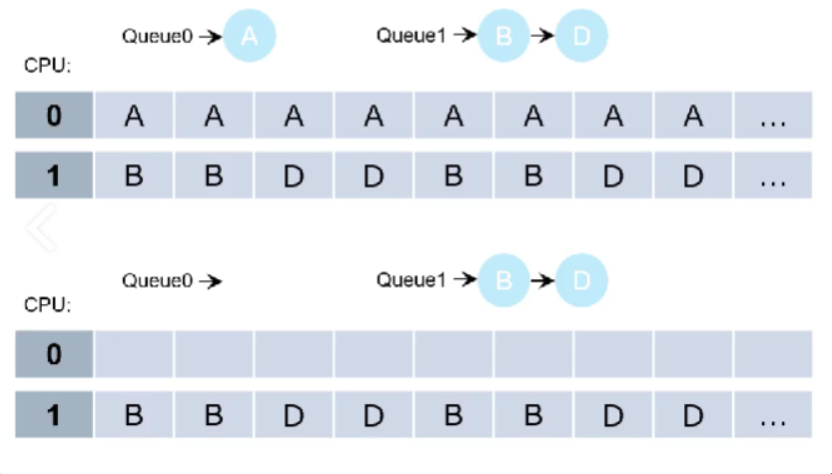 Load Imbalance로 비효율적인 상태인 MP system
Load Imbalance로 비효율적인 상태인 MP system
- SMP 시스템에서는 다중 프로세서를 활용하는 이점을 최대화 하기위해서, 프로세서들의 Workload balance를 맞추는것이 중요하다.
- 해결법
- Pull Migration : IDLE한 Processor가 다른곳에서 Process를 가져오는 방식
- Push Migration : 특정 작업이 각 Processor들의 Load 상태를 확인하여 적은쪽으로 Process를 보내는 방식
- 결국 다른 Queue의 상태정보를 파악하고, 프로세스를 옮기는데 Overhead가 발생한다.
HMP
- Heterogeneous Multiprocessing(이질성 멀티프로세싱)
- 각 프로세서들의 클럭속도와 전력관리 방법이 다르다
- Asymmetric MP와는 다른개념이다.
- 전력소모를 높여 성능을 중시한 Big core와, 에너지 효율을 키운 Little core로 이루어져있다.
- 프로세스들의 특징에 맞춰 적절히 분배하는것이 중요
Real-Time Scheduling
- 실시간 스케줄링
- 시스템이 작동되는 도중 실시간으로 이벤트가 일어나는 경우, 시스템은 가능한한 빨리 반응하고 처리해야한다.
- Event Latency = Interrupt Latency + Dispatch Latency 라는 개념을 사용하여 이를 최소화 하는것을 우선한다.
- 스케줄링 방식
- 적절하지않은 방식
- Round-Robin preemptive Scheduler : 현재 프로세스의 Time-Slice 가 종료될때까지 기다려야한다.
- Priority-Driven non-Preemptive Scheduler : 비선점방식이라 현재 프로세스가 종료될때까지 기다려야한다.
- 적절한 방식
- Priority-Driven Preemptive Scheduler : 선점방식이라 다음 선점시기에 Real-time event시작가능
- Immediate Preemptive Scheduler : 그냥 즉시 Real-time event시작
- Soft Real-Time systems(연성)
- 무조건적으로 Real-time Process를 먼저 실행한다고 보장하지 않는다.
- Deadline이 없는 작업일때 사용한다.
- Hard Real-Time systems(경성)
- 무조건 주어진 Deadline 안에 종료해야 하므로 Event Latency를 최소화하는데 집중한다.
- Deadline을 어길시 시스템에 치명적인 오류가 발생할 수 있다.
- RealTime Task
- Periodic Task : 주기적으로 발생하는 작업
- Aperiodic Task : 비주기적으로 발생하는 작업
- Starting Deadline : 언제까지 시작해야한다.
- Complete Deadline : 언제까지 완료되어야 한다.
- 두개중 하나의 Deadline은 갖지만, 두개다 갖는경우는 없다.
Prioriy Based Scheduling
- Real-Time 시스템에서 가장 중요한 부분은 Real-Time Process를 가능한한 빠르게 처리하는 것이다.
- 다중 Ready Queue에 우선순위를 부여해 높은 우선순위의 Queue부터 처리하도록 한다.
- soft Real-Time 시스템이다
- Starvation문제가 발생한다.
EDF
Earliest Deadline First
- Real-Time process의 Deadline을 파악하여 시스템에게 알려준다
시스템은 그 즉시 Deadline을 파악하여 해당 Process에 우선순위를 매긴다.
- Deadline을 고려하지 않는 Priority Based Scheduling의 경우에는 동시에 처리해야할 Real-Time process가 있는경우 그 우선순위를 임의로 판단하여 처리할 수 밖에 없지만(Miss 발생가능) EDF는 새로 도착하는 이벤트의 Deadline을 파악하여 그 우선순위를 설정한다.
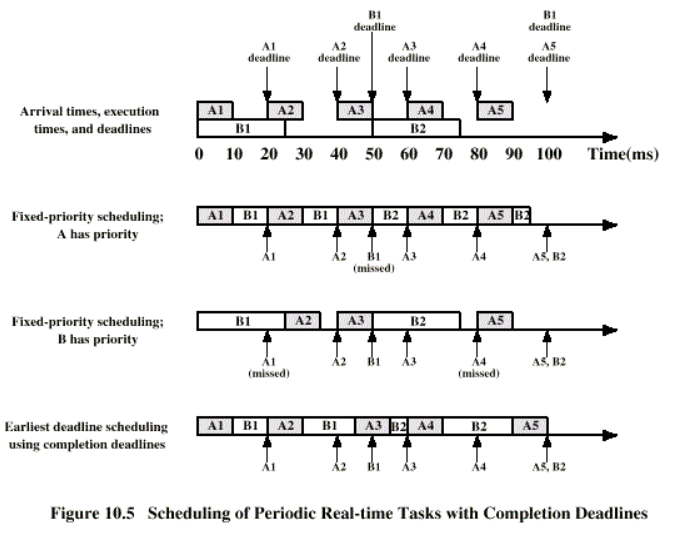 Complete Deadline을 고려하여 Miss를 없앤 EDF의 예시
Complete Deadline을 고려하여 Miss를 없앤 EDF의 예시
RMS
Rate Monotonic Scheduling
Perioic Real-Time Task를 Scheduling할때 주기가 짧을수록 높은 우선순위를, 주기가 길수록 낮은 우선순위를 할당하는것.
RMS의 좋은점은, 부등식 하나로 해당 시스템이 들어오는 Real-time periodic task에 대해 Deadline을 만족하는지 확인할 수 있다는 점이다.
*C : Execution Time / T = Period
Linux Scheduling
초기의 리눅스는 앞서다룬것과 같이 단일큐 Scheduler를 통해 다음 실행할 프로세스를 결정하였다. 이후 확장성의 한계로 다중큐 Scheduler를 채택하였고, O(1) Scheduling, Proportional Share Scheduling(CFS) 순으로 발전해왔다. 현재는 CFS를 사용중이다.
O(1) Scheduling
- Priority-based scheduler
- 우선순위가 정해진 140개의 Run Queue(0 ~ 139)가 존재하며, 각 Queue들은 Linked List로 구현한다.
- Bitmap을 통해 각 Run Queue에 실행할 Task의 유무를 파악할 수 있다.
- 해당 Queue의 Task들은 지정된 Time Slice만큼 실행되고 다음 Task로 넘어가며, 완료된 Task는 Active Run Queue에서 Expired Run Queue로 이동된다.
- Active Queue의 모든 작업이 실행되어 텅 빈상태가 되면, Active Queue와 Expired Queue를 교체하여 다시 실행한다.
.png) O(1) 스케줄러의 작동 방식
O(1) 스케줄러의 작동 방식
- 한계점
- 정확한 수행시간의 파악이 불가능하고, Task가 Queue에 들어간 이상 정해지는 우선순위로 확장성이 떨어지는 문제점이 발생한다. 이로인해 Proprotional Share Scheduling이 등장했다.
Proportional Share Schedulig
- 프로세스의 우선순위 뿐만이 아니라 Weight도 고려하여 CPU의 수행시간을 보장하는 방식.
- 실행되어야 할 프로세스의 weight이 크다면, CPU를 더 많이 할당해주는 시스템
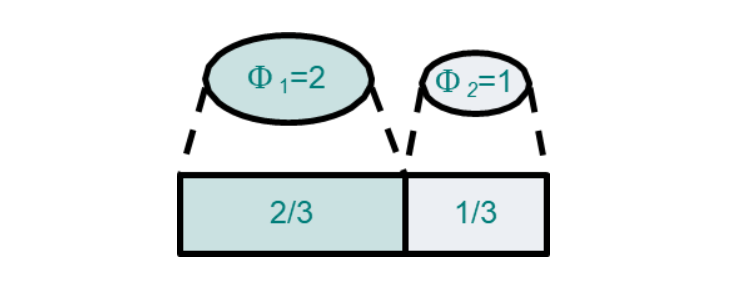 Task의 크기에 따라 CPU를 각각 2/3, 1/3씩 할당받은 모습
Task의 크기에 따라 CPU를 각각 2/3, 1/3씩 할당받은 모습
Linux에서 현재 사용되는 CFS또한 해당 방식을 사용한다.
최적화
- 프로세스의 Weight에 따라 얼마나 공정하게 CPU자원을 배분하느냐가 기준
- Service Time Error와 Scheduling Overhead로 공정성의 정확도를 판단한다.
- Service Time Error : 특정 Task의 실제 service time - 예정된 service time
- Scheduling overhead : Scheduling 단계에서 걸리는 시간
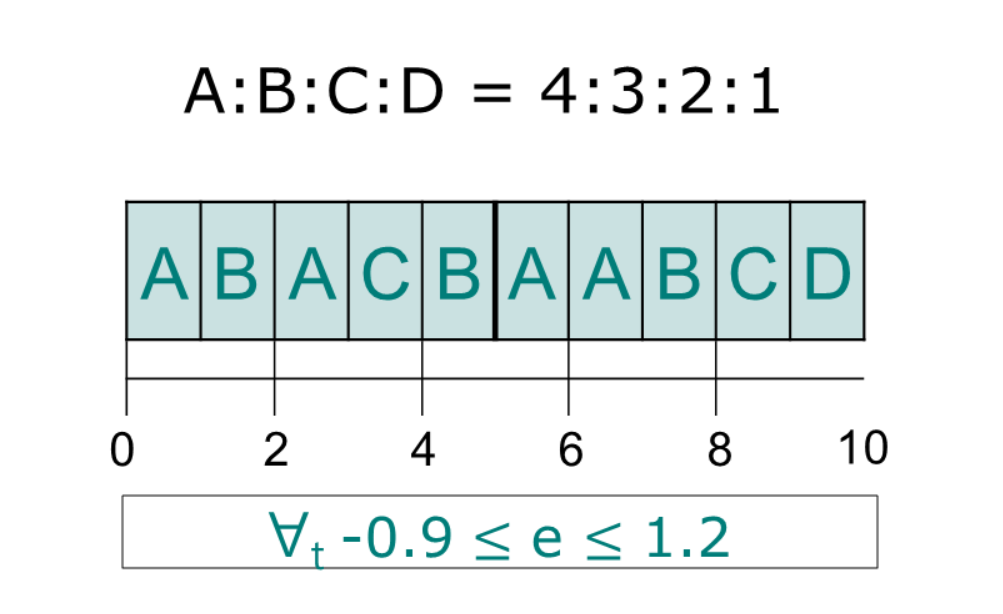
WFQ
Weighted fair queueing
오차값의 범위가 보장된 알고리즘
- Virtual Time
- 프로세스의 t시간까지의 누적수행시간을 해당 프로세스의 Weight로 나눈것
- Virtual Finish Time
- 현재상태에서 단위시간만큼 해당 프로세스를 실행했을때의 예상 누적시간
- VFT가 낮은것부터 실행해 나간다.
virtual time : \(VT_i(t) = \frac{w_i(t)}{ϕ_i}\)
virtual finish time : \(VFT_i(t) = \frac{w_i(t)+1}{ϕ_i}\)
\(ϕ_i =\) 프로세스의 Weight
- 보장된 오차
-0.9 ≤ e ≤ 1.2
CFS
Completely Fair Scheduler
- 리눅스 커널의 2.6.23 버전부터 사용되는 스케줄링방식
- 각 코어가 각각의 Queue를 갖는 다중 Ready Queue방식이다.
- 앞서 다룬 WFQ와 작동방식이 비슷하다.
- Virtual runtime이 적은 task부터 실행한다.
- 리눅스에서는 Red-Black Tree 알고리즘을 사용하여 Virtual runtime이 낮은 “트리의 가장 왼쪽에 있는 노드”의 Task를 먼저 실행한다.
- 어떤 task도 변화하는 Virtual runtime의 값에 따라 트리의 가장 왼쪽에 올 수 있다.
